Gaussian Process (GP) Surrogate Modeling¶
Note
Surrogate modeling functionality of PBE is built upon GPy library (available under BSD 3-clause license), an opensource Python framework for Gaussian process modeling developed in the Sheffield machine learning group.
Input description¶
Case 1: Sampling and Simulation¶
When the Training Dataset option is set to the Sampling and Simulation, a simulation model should be presented in the later tabs. The training points are sampled adaptively by the design of experiments.
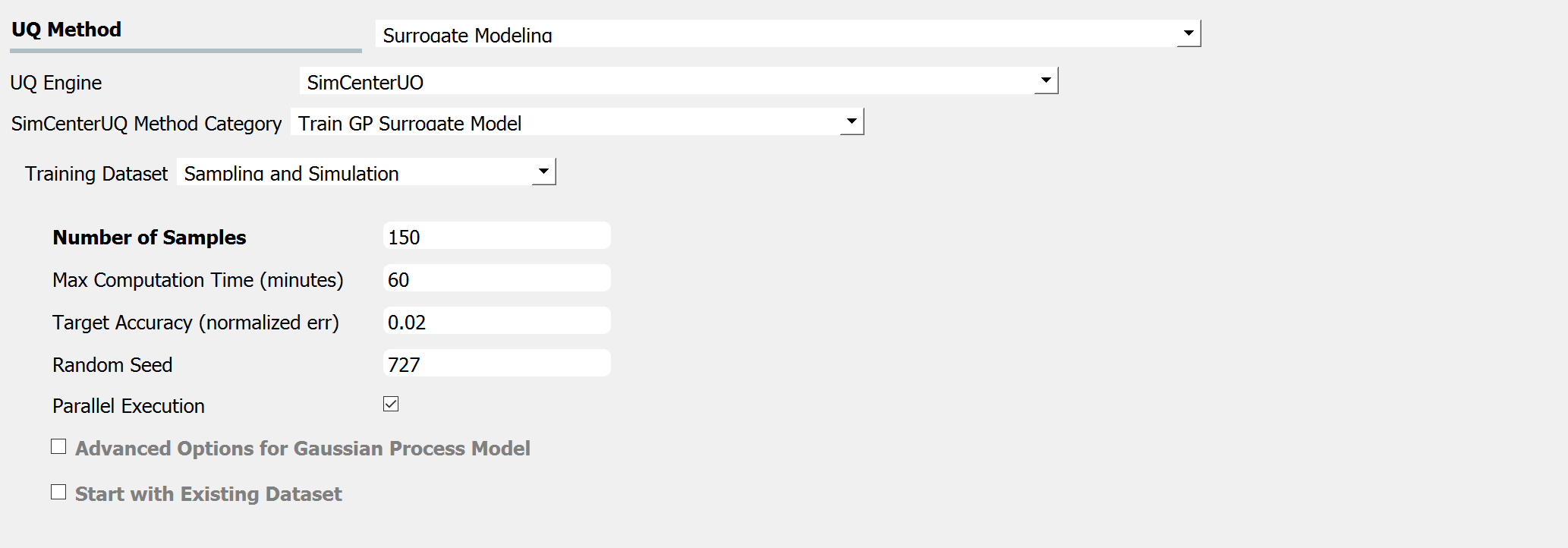
Input panel for surrogate modeling¶
Maximum Number of Model Runs: When the number of simulation runs reaches the limit, the analysis will be terminated.
Maximum Computation Time (in minutes): When the tolerance limit of the computation time is reached, the analysis will be terminated. There will be a few minutes of error.
Target Accuracy (Normalized Error): The target accuracy is defined in terms of normalized root-mean-squared error (NRMSE) estimated by leave-out-one cross-validation (LOOCV).
()¶\[\begin{align*} \rm{NRMSE} ~ &= \frac{\sqrt{\frac{1}{N} \sum^{N}_{k=1} (y_k-\hat{y}_k)^2}}{\max_{k=1,...,N}(y_k)-\min_{k=1,...,N}(y_k)} \end{align*}\]where\(y_k\): exact response from the model simulation\(\hat{y}_k\): estimated response by LOOCV surrogate model prediction\(N\): number of samples used to train the surrogate modelRandom Seed: Seed of the random number generator
Parallel execution: This engine implemented multiprocessing (local) or mpi4py (remote) python packages to run parallel execution.
Note that the results from the parallel and serial run may not be exactly the same because parallel execution sets the number of batch design of experiments (DoE) in order to maximize the use of resources (Default DoE interval: 5). User can also activate the following advanced options:
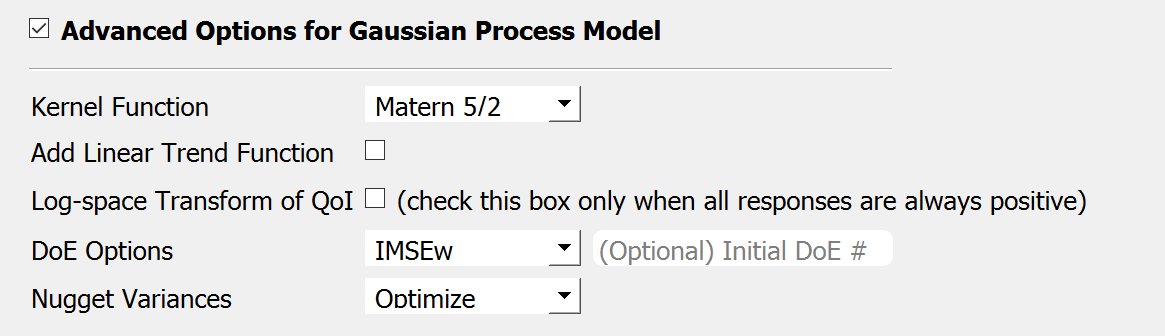
Advanced Options for Gaussian Process Model
Sampling and Simulation - Case 1¶
Start with Existing Dataset
RV (Random Variables) Tab¶
The bounds of RVs need to cover the domain of interest in future applications, while it should not be unnecessarily stretched. Input type and Distribution should be set to Parameters and Uniform. When a dataset is provided, make sure to match the order of RVs in the RV tab to the order of data columns. Any correlation values will be ignored.
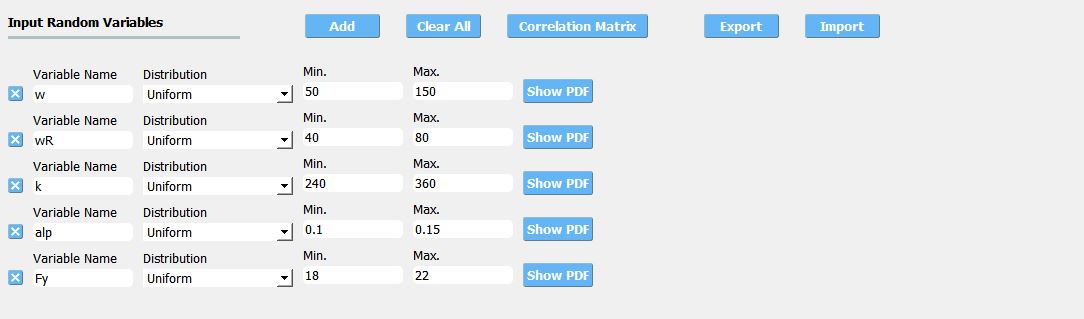
Example of RV tab¶
Output description¶
Goodness-of-Fit¶
Once the training is completed, the following three verification measures are presented based on leave-one-out cross-validation (LOOCV) error estimation.
Leave-one-out cross-validation (LOOCV)
LOOCV prediction \(\hat{\boldsymbol{y}}_k\) at each sample location \(\boldsymbol{x}_k\) is obtained by the following procedure: A temporary surrogate model \(\hat{\boldsymbol{y}}=f^{sur}_{loo,k}(\boldsymbol{\boldsymbol{x}})\) is constructed using the samples \(\{\boldsymbol{x}_1,\boldsymbol{x}_2,...,\boldsymbol{x}_{k-1},\boldsymbol{x}_{k+1},...,\boldsymbol{x}_N\}\) and the calibrated parameters, and the prediction \(\hat{\boldsymbol{y}}_k=f^{sur}_{loo,k}(\boldsymbol{x}_k)\) is compared with the exact outcome.
We provide different verification measures for two different cases.
When nugget variance is low: The LOOCV prediction \(\hat{\boldsymbol{y}}_k\) is expected to match the exact outcome \(\boldsymbol{y_k}=f(\boldsymbol{x}_k)\) when the surrogate model is well-trained. To quantify the goodness, R2 error, normalized root-mean-squared-error (NRMSE), and correlation coefficient are provided:
R2 error
R2 error is defined in terms of the total sum of squares over the residual sum of squares()¶\[\begin{align*} R^2 &= 1 - \frac{\sum^N_{k=1} (\hat{y}_k-\mu_\hat{y})^2}{\sum^N_{k=1} (\hat{y}_k-y_k)^2} \end{align*}\]The surrogate model is considered well-trained when the R2 (<1) approaches 1Normalized root-mean-squared-error (NRMSE)
()¶\[\begin{align*} \rm{NRMSE} ~ &= \frac{\sqrt{\frac{1}{N_t} \sum^{N_t}_{k=1} (y_k-\hat{y}_k)^2}}{\max_{k=1,...,N_t}(y_k)-\min_{k=1,...,N_t}(y_k)} \end{align*}\]The surrogate model is considered well-trained when the NRMSE (>0) approaches 0Correlation coefficient
Correlation coefficient is a statistic that measures the linear correlation between two variables()¶\[ \rho_{y,\hat{y}} = \frac{\sum^N_{k=1}(y_k-\mu_{y})(\hat{y}_k-\mu_{\hat{y}})} {\sigma_y \sigma_\hat{y}}\]where\(\mu_{y}\) : mean of \(\{y_k\}\)\(\mu_{\hat{y}}\): mean of \(\{\hat{y}_k\}\)\(\sigma_{y}\): standard deviation of \(\{y_k\}\)\(\sigma_{\hat{y}}\): standard deviation of \(\{\hat{y}_k\}\)The surrogate model is considered well-trained when the correlation coefficient ( \(-1<\rho<1\) ) approaches 1
When nugget variance is high: The distance between LOOCV prediction \(\hat{\boldsymbol{y}}_k\) and the exact outcome \(\boldsymbol{y_k}=f(\boldsymbol{x}_k)\) is expected to follow a normal distribution when the surrogate model is well-trained. To quantify the goodness, inter-quartile ratio (IQR) and Cramer-Von Mises statistics can be evaluated:
Inter-quartile ratio (IQR): IQR provides the ratio of the sample QoIs that lies in 25-75% LOOCV prediction bounds (interquartile range). The IQR values should theoretically approach 0.5 if the prediction is accurate.
Cramer-Von Mises statistics: Cramer-Von Mises statistics calculate the normality score. A GP assumes that the observations follow a normal distribution conditional on the input parameters. To assess the normality of the model predictions, the difference between the mean prediction \(\hat{y}_k\) and the sample observation \(y_k\) value is divided by the standard deviation prediction from surrogate \(\hat{\sigma}_{y,k}\):
()¶\[ u_k = \frac{y_k-\hat{y}_k} {\hat{\sigma}_{y,k}}\]If the values of \({u_k}\) follow the standard normal distribution, the resulting surrogate model may be considered well-constructed. The Cramer-Von Mises test is calculated using the
scipy.stats.cramervonmisesfunction in the Python package Scipy, and the resulting p-value is displayed. Conventionally, if the p-value exceeds a significance threshold, e.g. 0.05, the null hypothesis that the samples are from a normal distribution is not rejected, meaning the samples may be considered to follow a Gaussian distribution.
Additionally, scatter plot between the predicted and exact responses is presented: Well-trained model will form a clear diagonal line in case (i), or be distributed normally around the diagonal line in case (ii). A poorly trained model will have points that are more scattered around.
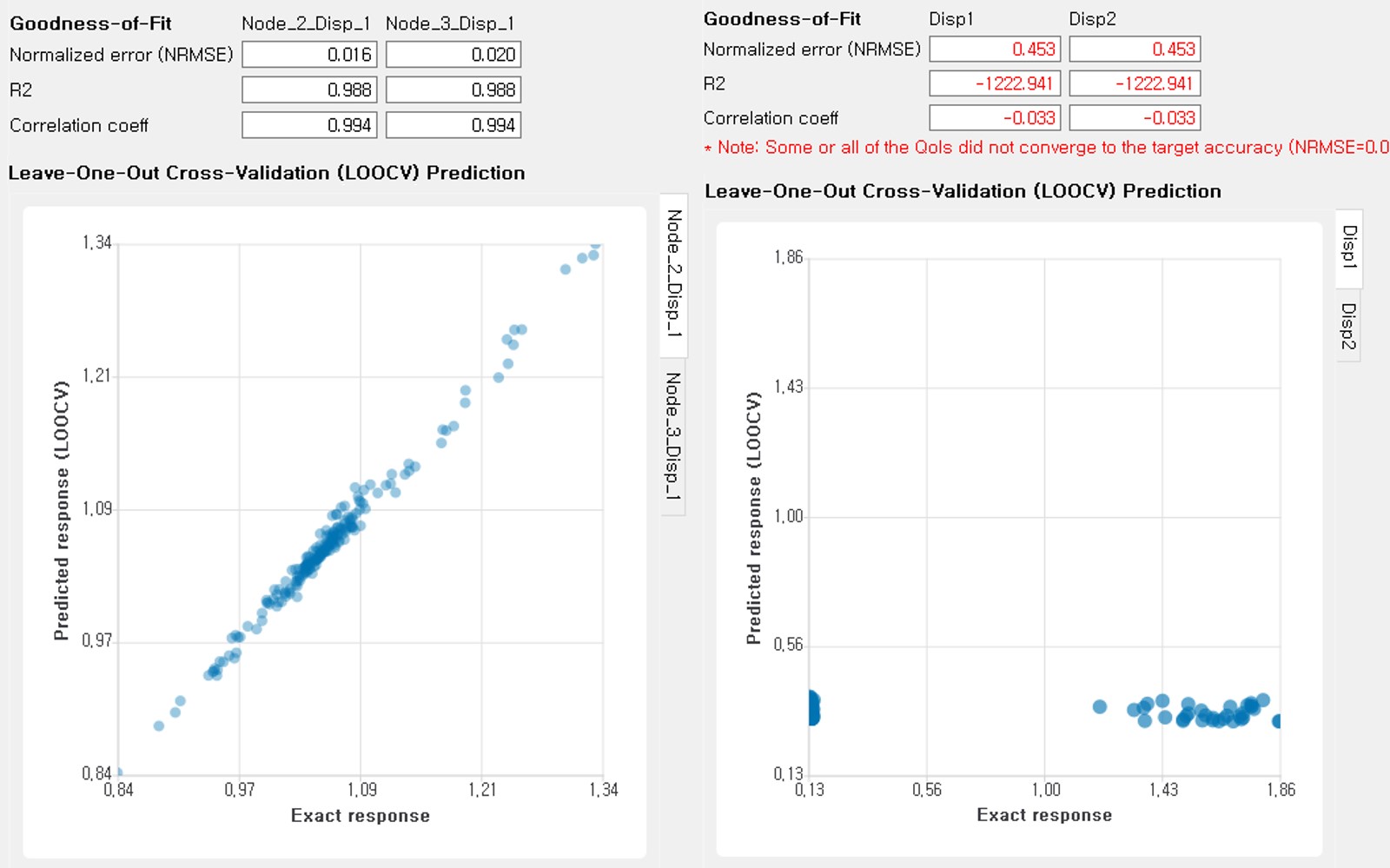
Well-trained surrogate (left) and poorly trained surrogate (right) models¶
Note
Since these validation measures are calculated from the cross-validation predictions, they can be biased, particularly when a highly localized nonlinear range exists in the actual response surface, and those regions are not covered by the training samples. The introduction of adaptive design of experiments helps to suppress the bias by enabling the targeted selection of simulation points around potentially faulty regions.
Warning
Note that GP-based surrogate models can be used to fit only smooth, continuous functions. When the surrogate model is poorly trained, a parametric study is highly recommended to check for any possible discontinuity presented in the simulation model.
Saving Options¶
Save GP Model: The constructed surrogate model is saved. One main file and one auxiliary folder will be saved.
SurroateGP Info File (default name:
SimGpModel.json): This file contains information required to quickly reconstruct the surrogate model and predict the response for different input realizations. This can be later imported into EEUQ.Simulation template directory (default name:
tmplatedir_SIM): This folder contains all the scripts and commands to run the original dynamic time history analysis. This folder can later be imported into EEUQ along with the surrogate model to alternate between original simulations and surrogate predictions or compare the surrogate predictions to the response of the original model.Only for the multi-fidelity case in quoFEM, additional SurroateGP model file (default name:
SimGpModel.pkl) will be written along with the above two.
Warning
Do not place the above surrogate model files in your root, downloads, or desktop folder as when the application runs it will copy the contents on the directories and subdirectories containing these files multiple times. If you are like us, your root, Downloads, or Documents folders contain an awful lot of files and when the backend workflow runs you will slowly find you will run out of disk space!
Save GP Info: This is a report generated for user reference. It contains the GP model parameter and other information. The default file name is
GPresults.out.RV Data, QoI Data:It saves the samples of RV and QoI. The default file names are
X.txtandY.txt, respectively. IMPORTANT: To continue surrogate modeling with additional simulations, save the RV and QoI sample files using this button and import them as initial points. Refer to the ‘Start with Existing Dataset’ option in Case 1.

Saving options¶
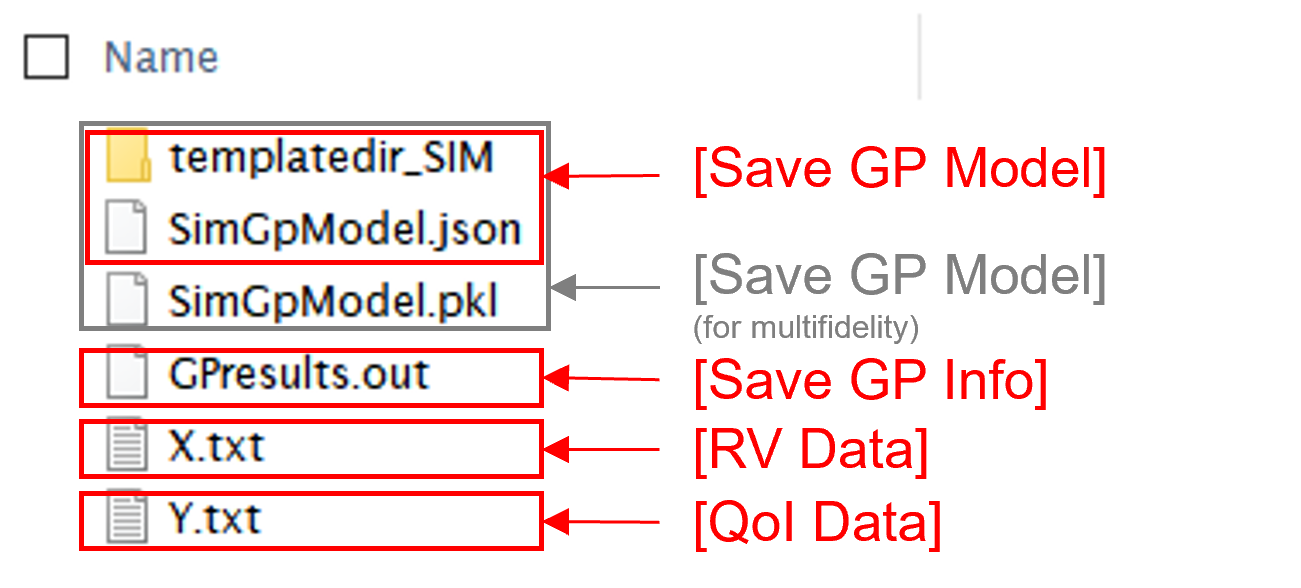
Example outputs from saving options¶
- Patsialis2021
Patsialis, D., and A. A. Taflanidis. (2021). Multi-fidelity Monte Carlo for seismic risk assessment applications. Structural Safety 93: 102129.